ในฐานะองค์ประกอบหลักของเครื่องยนต์ระบบนําทาง, ความแม่นยําของการวัดของ IMU กําหนดโดยตรงผลงานโดยรวมของระบบการนําทาง Two-dimensional calibration of the IMU primarily involves calibrating the error parameters of the accelerometers and gyroscopes in the horizontal plane (typically a combination of pitch-roll or azimuth-pitch). Aอัตราการใช้งานสองแกนโต๊ะ, ด้วยความสามารถในการตั้งตําแหน่งมุมความแม่นยําสูงและการควบคุมอารมณ์เป็นอุปกรณ์หลักในการบรรลุการปรับขนาดนี้ตามมาตรฐานของอุตสาหกรรมและวิธีการวิศวกรรม, รายละเอียดกระบวนการทั้งหมดของการปรับระดับ IMU สองมิติโดยใช้เครื่องปรับระดับสองแกนอัตราตารางที่ครอบคลุมสี่ขั้นตอนหลัก: การเตรียมการคารีบราชั่นก่อน, ขั้นตอนการคารีบราชั่นหลัก, การประมวลผลและการตรวจสอบข้อมูลและความซ้ําของกระบวนการปรับระดับและความน่าเชื่อถือของการปรับขนาดผล
I. การเตรียมก่อนการปรับขนาด
การเตรียมการก่อนการปรับระดับเป็นสิ่งสําคัญในการรับประกันความแม่นยําของการปรับระดับการติดตั้งและแก้ไขปัญหา IMU, และการตั้งระบบซอฟต์แวร์ เพื่อให้แน่ใจว่าทุกขั้นตอนจะตอบสนองความต้องการในการปรับขนาด
(Ⅰ) การเลือกและตรวจสอบอุปกรณ์
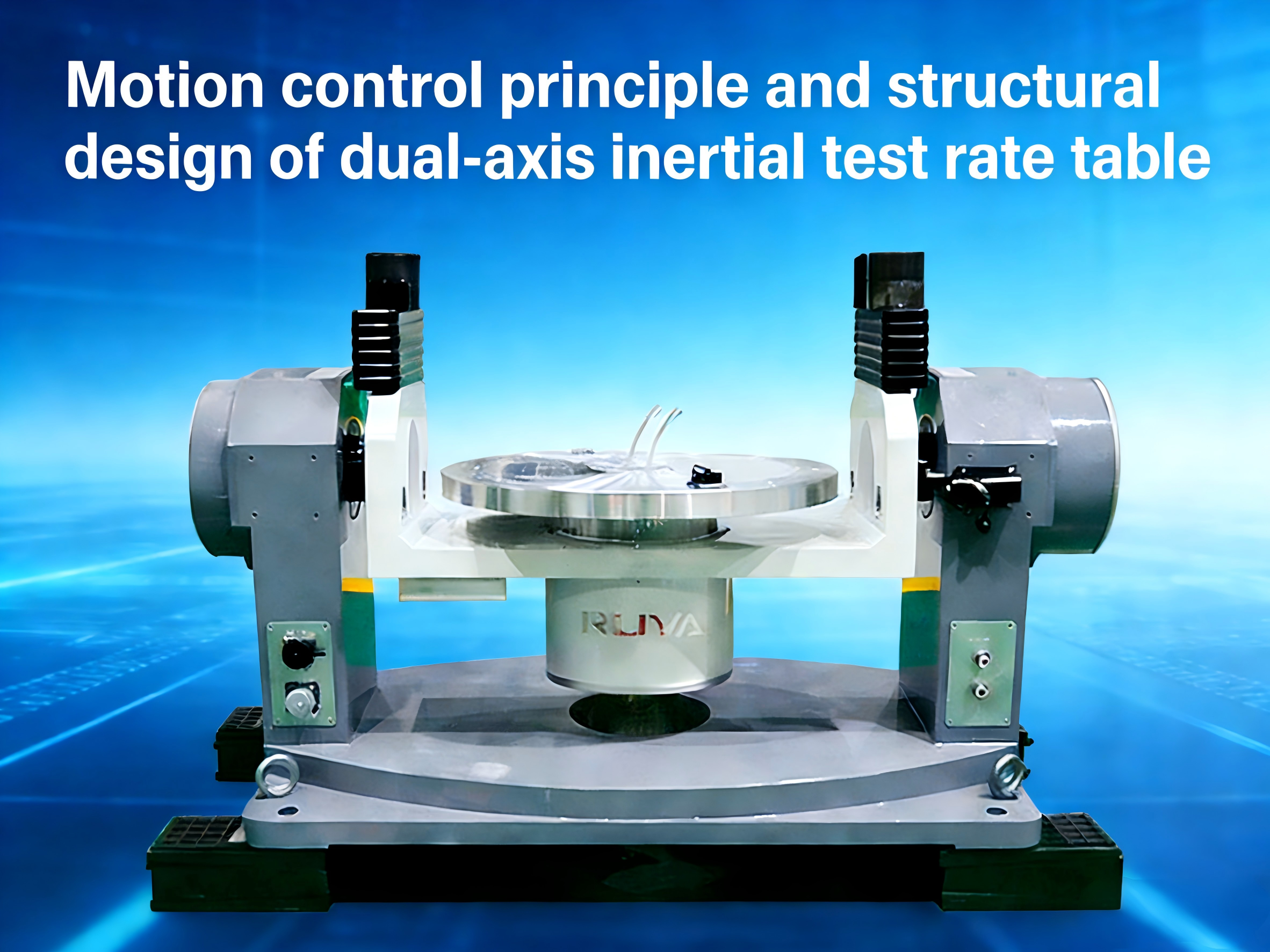
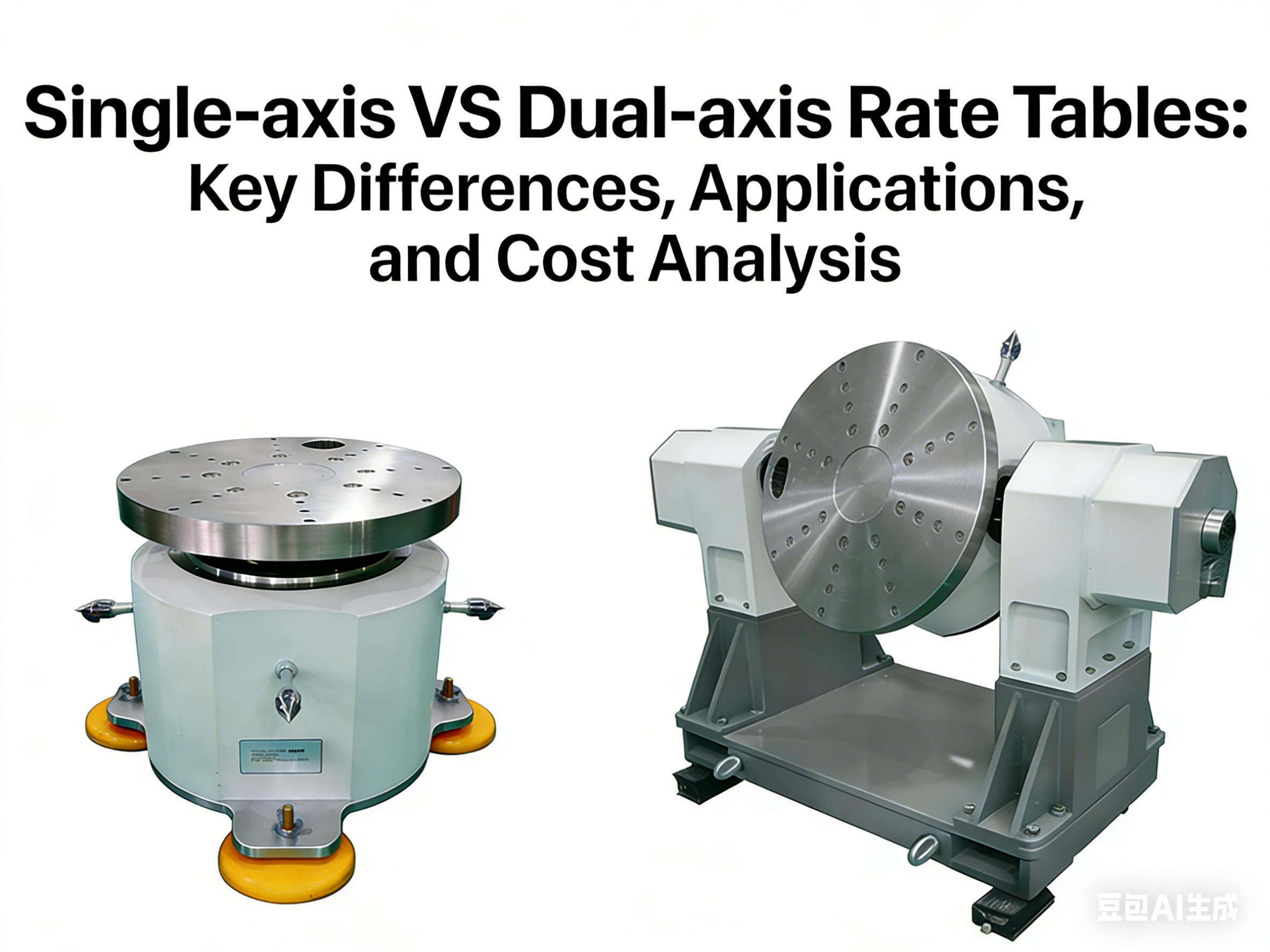
1.หมุนสองแกนอัตราการเลือกตาราง: ตามระดับความแม่นยําของ IMU และความต้องการในการปรับระดับ เลือกแบบสองแกนอัตราตารางที่ตอบสนองความต้องการสําหรับความแม่นยําของตําแหน่งมุม ความมั่นคงของอัตรามุม และความแน่นของแกน สําหรับ IMU ความแม่นยํากลางถึงสูง (เช่น IMU ระดับการนําทาง)อัตราความแม่นยําตําแหน่งมุมของโต๊ะควรดีกว่า 10′′ และความตั้งแน่นของแกนควรดีกว่า 5′′ สําหรับ IMU ระดับผู้บริโภคอัตราความแม่นยําของตารางสามารถลดลงอย่างเหมาะสม (ความแม่นยําตําแหน่งมุม ≤ 30 ")อัตราตารางต้องรองรับโหมดการตั้งตําแหน่งสแตตติก และโหมดการออกอัตราไดนามิค และตอบสนองความต้องการในการปรับระดับสําหรับ accelerometer 0 bias และตัวประกอบขนาดรวมถึง gyroscope เซโล bias และปริมาณตัวประกอบ.
2.การตรวจสอบอุปกรณ์ช่วย: เตรียมเครื่องพลังงานความแม่นยําสูง (ความมั่นคงของแรงดันออก ≤ 0.1%) เพื่อให้พลังงานให้กับ IMU โดยการรับรองว่าความผันผวนของแรงดันจะไม่นํามาซึ่งความผิดพลาดในการวัดใช้การ์ดเก็บข้อมูล (อัตราการเก็บตัวอย่าง ≥ 100Hz, ความละเอียด ≥ 16 บิต) เพื่อรับสัญญาณเร่งและความเร็วมุมที่ออกมาจาก IMUอัตราตาราง; ตรวจสอบระบบควบคุม servo ด้วยอัตราโต๊ะเพื่อให้แน่ใจว่าหมุนแกนเรียบร้อยโดยไม่ต้องสูญเสียขั้นตอนหรือ jitter นอกจากนี้เครื่องมือเช่นเครื่องปรับระดับและสกุลหมุนที่จําเป็นสําหรับการปรับระดับและการติดตั้ง IMU หลังการติดตั้ง
3.การปรับขนาดและตรวจสอบอุปกรณ์: การปรับขนาดเบื้องต้นของแกนสองอัตราตารางถูกทําเพื่อตรวจสอบตําแหน่งมุมของมัน,อัตรามุมความแม่นยําและความตั้งแน่นแกนในหมู่รายละเอียดเทคนิคอื่น ๆค่าจริงและค่าที่สั่งสําหรับแกนแต่ละของอัตราตารางที่ตําแหน่งมุมที่แตกต่างกันจะวัดเพื่อให้แน่ใจว่าความเบี่ยงเบนอยู่ในขอบเขตที่ยอมรับได้อัตราการตรวจสอบระนาบอัตราฐานแนวราบของตาราง เพื่อให้แน่ใจว่าความเรียบของตารางดีกว่า5′′ ในขณะเดียวกัน, IMU ถูกเปิดและทําความร้อนก่อน, สถานะการผลิตเริ่มต้นของมันถูกบันทึก, และการทํางานผิดปกติของอุปกรณ์เริ่มต้นถูกกําจัด
(Ⅱ) การควบคุมสภาพสิ่งแวดล้อม
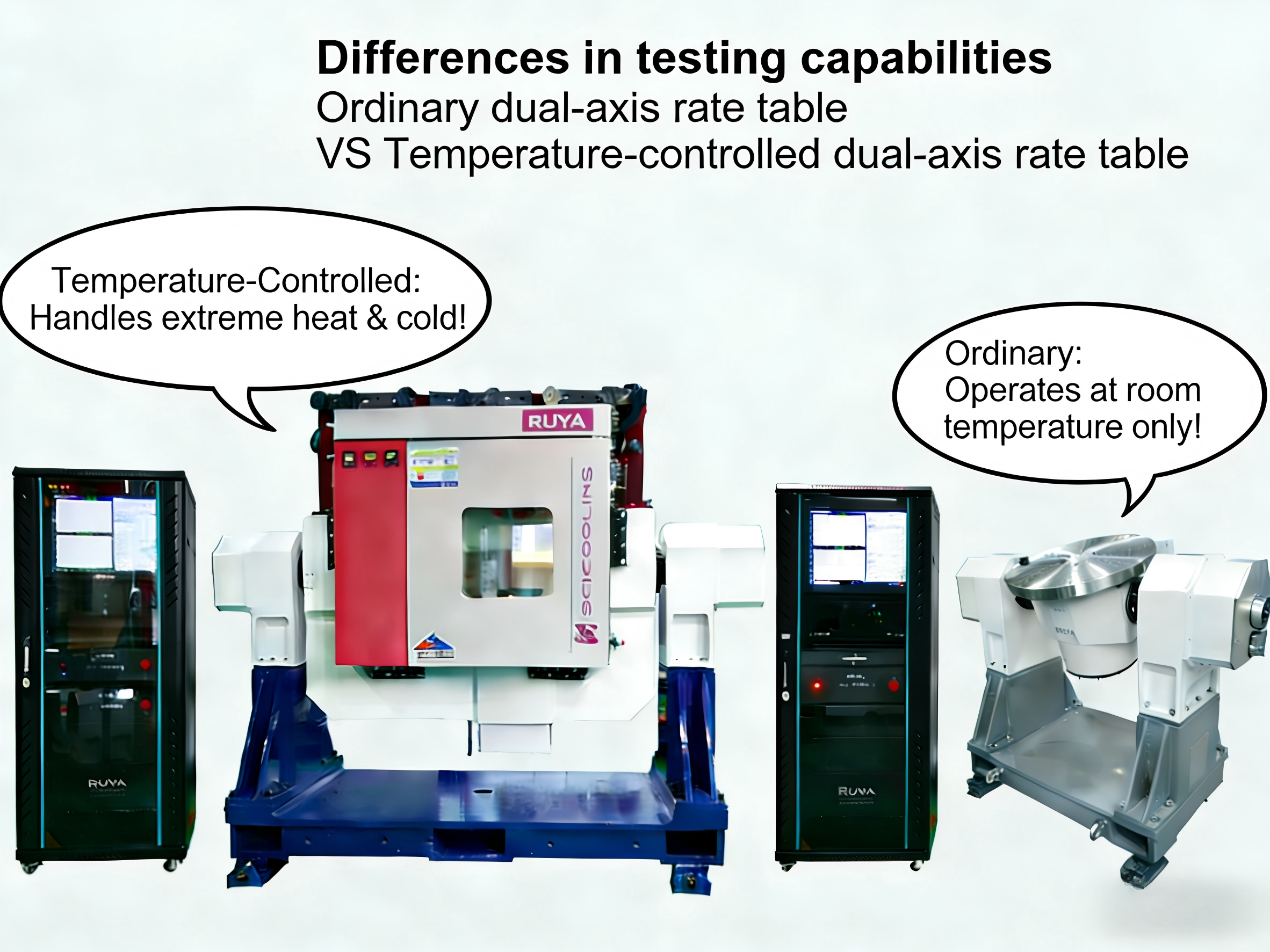
1.การควบคุมอุณหภูมิ: ปริมาตรความผิดพลาดของ IMU มีอิทธิพลที่สําคัญจากอุณหภูมิ อุณหภูมิสภาพแวดล้อมการปรับปรุงควรถูกควบคุมที่ (20±2) °C และอัตราการเปลี่ยนแปลงอุณหภูมิควร ≤ 0.5 °C/h. This can be achieved through a constant temperature laboratory or a temperature control system to ensure temperature stability during calibration and reduce the impact of temperature drift on the calibration results.
2.การควบคุมการสั่นสะเทือนและการรบกวน: สภาพแวดล้อมการปรับระดับต้องอยู่ห่างจากแหล่งสั่น (เช่นเครื่องมือเครื่องจักร, แฟน,ยานหนัก ฯลฯ), และมาตรการป้องกันการสั่นสะเทือนที่พื้นดิน (เช่นสร้างพื้นฐานแยกจากสั่น หรือการติดตั้งพัดแยกการสั่นสะเทือน) เพื่อให้แน่ใจว่าความเร่งสั่นสะเทือนของสภาพแวดล้อม ≤ 0.01gอัตราเครื่องมือตาราง, IMU และอุปกรณ์การเก็บข้อมูล (ความต้านทานการติดพื้น ≤4Ω) เพื่อลดการรบกวนของเสียงไฟฟ้าแม่เหล็กต่อสัญญาณออกของ IMU
3.การควบคุมความดันและความชื้นของอากาศ: สําหรับ IMU ที่พึ่งพาความดันอากาศในการปรับขนาด (เช่น IMU ที่รวมกันกับบารโเมตรบางอัน) ความดันอากาศรอบตัวควรคงที่ในความดันอากาศมาตรฐาน (101.325kPa±1kPa)และความชื้นสัมพันธ์ควรควบคุมที่ 40% ~ 60% เพื่อหลีกเลี่ยงการเปลี่ยนแปลงความชื้นที่ทําให้วงจรภายในของ IMU หนาวหรือผลงานของความละเอียดเสื่อม.
(Ⅲ) การติดตั้งและแก้ปัญหา IMU
1.การติดตั้งเครื่องจักรกล: ติดต่อ IMU กับโต๊ะทํางานของตารางอัตราการทํางานสองแกน โดยใช้แคลมปุ่มพิเศษ, รับประกันว่าแกนการตรวจจับของ IMU เป็นตรงกับ rกินโดยทั่วไปแกน X ของ IMU ควรเป็นขนานกับแกนหมุนของ rกินแกนภายใน (หรือภายนอก) ของตารางและแกน Z ควรตั้งค่ากับ rกินของโต๊ะ (คือตามทิศทางของแรงโน้มถ่วง) ใช้กุญแจแรงหมุนเพื่อกระชับเครือให้ถึงแรงหมุนที่กําหนดไว้การหลีกเลี่ยงการปลดเปลือยเกิน ซึ่งอาจทําให้ IMU ขับเคลื่อนระหว่างการปรับหรือความแน่นเกิน ซึ่งอาจทําให้ IMU มีการปรับปรุงโครงสร้าง
2.การปรับระดับการสอดคล้องแกน: ความแม่นยําการจัดท่าระหว่าง IMU และอัตราโต๊ะถูกปรับด้วยการใช้เครื่องมือระดับและเลเซอร์ตําแหน่งอัตราโต๊ะไปในตําแหน่งแนวราบ, รับรองว่าแกน Z ของ IMU เป็นขนานกับทิศทางของแรงโน้มถ่วงอัตราตาราง, ตรวจสอบความคล้ายคลึงระหว่างแกนการตรวจจับของ IMU และอัตราแกนหมุนของตาราง ความผิดพลาดของการขนานกันควร ≤ 5′′ หากความแม่นยําของการจัดอันดับไม่ตรงกับความต้องการปรับตําแหน่งของเครื่องปรับและซ้ําการปรับจนกว่ามันจะตรงกับมาตรฐาน.
3.การเชื่อมต่อไฟฟ้าและการแก้ไขข้อผิดพลาด: ติดต่อ IMU กับการ์ดไฟฟ้าและการสกัดข้อมูล เพื่อรับรองการเชื่อมต่อไฟฟ้าที่ปลอดภัยและการติดต่อที่ดี เพื่อป้องกันการสูญเสียสัญญาณหรือการบิดเบือนที่เกิดจากการเชื่อมต่อที่คล่องคล่องระยะเวลาในการทําความร้อนขึ้นอยู่กับประเภทของ IMU (IMU ระดับการเดินเรือโดยทั่วไปต้องการ 30-60 นาที, IMU ระดับผู้บริโภคต้องใช้เวลา 10-20 นาที) เพื่อให้อุณหภูมิภายในของ IMU ได้ปรับตัวเสียงดังมากเกินไป, หรือความผิดปกติอื่น ๆ เกิดขึ้น, แก้ปัญหาสายไฟหรืออุปกรณ์.
(Ⅳ) การตั้งระบบซอฟต์แวร์
1.การตั้งค่าซอฟต์แวร์ควบคุม: ติดตั้งสองแกนอัตราโปรแกรมควบคุมตารางและตั้งค่า rกินปริมาตรแกนของตาราง (เช่นกว้างหมุน, อัตราการส่ง), รูปแบบควบคุม (สถิติ/ไดนามิก), สถานที่มุม/อัตรามุมการตั้งค่า, ฯลฯ ในขณะเดียวกัน, กําหนดเงื่อนไขการก่อให้เกิดการเก็บข้อมูลเพื่อให้แน่ใจว่าการเก็บข้อมูลจะเริ่มต้นเพียงหลังจาก rกินความตั้งของโต๊ะได้มั่นคง ป้องกันการรบกวนสัญญาณระหว่างกระบวนการเปลี่ยน
2.การแก้ไขปัญหาของซอฟต์แวร์การสกัดข้อมูล: ปรับปรุงซอฟต์แวร์การสกัดข้อมูล โดยการตั้งค่าปารามิเตอร์ เช่น อัตราการเก็บตัวอย่าง ระยะเวลาการเก็บตัวอย่าง และรูปแบบการเก็บข้อมูล (เช่น CSV, MAT file)สร้างกลไกการรับซินคอนสําหรับสัญญาณออก IMU และอัตราสัญญาณการตอบสนองจากตาราง, รับประกันว่าตราเวลาของมันถูกปรับให้ตรงกับความผิดพลาด ≤1ms; ตรวจสอบความสมบูรณ์แบบและความแม่นยําของการเก็บข้อมูลผ่านการทดสอบการเก็บข้อมูลแบบจําลองและแก้ปัญหา เช่น การสูญเสียข้อมูลและความช้า.
3.การใช้อัลการิทึมการปรับขนาด: ตามความต้องการในการปรับขนาด (เช่น การปรับขนาดของ accelerometer bias/scaling factor, gyroscope bias/scaling factor)ใช้อัลกอริทึมการปรับขนาดที่ตรงกัน (เช่นวิธีเฉลี่ยเฉลี่ย), Kalman filter method) เริ่มต้นปารามิเตอร์อัลการิทึม เช่น จํานวนการทบทวนและขั้นต่ําการเข้าใกล้เพื่อให้แน่ใจว่า อัลการิทึมสามารถแก้ไขได้อย่างแม่นยํา สําหรับปารามิเตอร์ความผิดพลาดของ IMU.
II. กระบวนการปรับระดับหลัก
กระบวนการปรับระดับแกนหมุนรอบสององค์ประกอบแกนหลักของ IMU: เครื่องวัดความเร่งและเครื่อง gyroscopeจากความสามารถในการตั้งตําแหน่งสแตตติกและการควบคุมอัตราการเคลื่อนไหวแบบไดนามิคของแกนสองอัตราตาราง, ปริมาตรความผิดพลาดในสองมิติถูกปรับปรุงเป็นขั้นตอน. กระบวนการนี้นําการปรับปรุงสองมิติ " pitch-roll" เป็นตัวอย่าง, ครอบคลุมสามขั้นตอนสําคัญ:การปรับระดับสแตติกของเครื่องเร่ง, การปรับระดับความคัดค้านศูนย์ของจิโรสโกปสแตติก และการปรับระดับความเร็วของจิโรสโกปไดนามิก
(Ⅰ) การปรับสแตติกของเครื่องวัดความเร็ว
เป้าหมายของการปรับขนาดสแตตติกของเครื่องวัดความเร่ง คือการแก้ไขให้เกิดความเสื่อมและปัจจัยการปรับขนาดมันใช้การคาดการณ์ของความเร่งของแรงโน้มถ่วง ภายใต้ท่าทางที่แตกต่างกัน, และกําหนดรูปแบบความผิดพลาดและแก้ปริมาตรโดยวัดสัญญาณเร่งที่ออกมาจาก IMU
1.การวางแผนทัศนคติสําหรับการปรับขนาด: โดยใช้ทิศทางสองมิติของการกระชับและการม้วน, การวางแผนการตั้งท่าสแตตติกแบบเฉพาะเจาะจงหก (การันตีว่าความเร่งแรงโน้มถ่วงสามารถครอบคลุม X, Y,และแกนที่มีความรู้สึก Z ของเครื่องวัดความเร็ว). ท่าทางเฉพาะอย่างยิ่งคือดังต่อไปนี้: 1 Pitch 0 °, Roll 0 ° (Z-แกนบวกตามทิศทางของแรงโน้มถ่วง); 2 Pitch 0 °, Roll 180 ° (Z-แกนลบตามทิศทางของแรงโน้มถ่วง); 3 Pitch 90 °,รอลล์ 0° (แกน X เป็นบวกตามทิศทางของแรงโน้มถ่วง); 4 Pitch 90°, Roll 180° (แกน X ลบตามทิศทางของแรงโน้มถ่วง); 5 Pitch 0°, Roll 90° (แกน Y บวกตามทิศทางของแรงโน้มถ่วง); 6 Pitch 0°,รอลล์ 270° (แกน Y ลบตามทิศทางของแรงโน้มถ่วง).
2.การ ปรับปรุง และ ปรับปรุง ทัศนคติ: คําสั่งตําแหน่งมุมสําหรับทัศนคติแต่ละเป็นลําดับถูกส่งผ่านสองแกนอัตราโปรแกรมควบคุมโต๊ะอัตราโต๊ะขับเคลื่อน IMU ให้หมุนไปยังมุมมองเป้าหมาย มันยังคงคงคงเป็นสแตตติกการประกันความมั่นคงของสัญญาณเร่งที่ออกมาจาก IMU (สัดส่วนการเปลี่ยนแปลงสัญญาณ ≤0.001g) ระหว่างการปรับความมั่นคง สัญญาณการตอบสนองสถานะมุมของอัตราตารางติดตามในเวลาจริง หากความเบี่ยงเบนความตั้งใจเกินระยะที่อนุญาต (≤ 5 ′′)อัตราตารางทํางานอัตโนมัติการปรับค่าตอบแทน
3.การเก็บข้อมูลและบันทึก: หลังการตั้งค่าตัวแต่ละครั้ง โปรแกรมการเก็บข้อมูลจะเปิดใช้เพื่อรับสัญญาณเร่งแกน X, Y และ Z ที่ออกมาจาก IMU ระยะเวลาการเก็บตัวอย่าง ≥ 10 วินาทีและอัตราการเก็บตัวอย่าง ≥100Hzในขณะเดียวกัน, ตําแหน่งมุมจริงของอัตราตาราง (มุมฉาก θ, มุมม้วน φ) จะบันทึกไว้เพื่อคํานวณค่าการกระจายของความเร่งแรงโน้มถ่วงบนแกนที่รู้สึกแต่ละแกน (ข้อมูลข้อมูล)ข้อมูลที่ได้รับถูกเก็บไว้ตามแนวคิด, แท็กที่ติดป้ายชัดเจนด้วยข้อมูลความตั้งใจและเวลา
4.การกําหนดรูปแบบความผิดพลาดและการแก้ไขพารามิเตอร์: โมเดลความผิดพลาดของเครื่องวัดความเร่งถูกกําหนด โดยไม่สนใจความผิดพลาดในการเชื่อมต่อข้าม (ซึ่งสามารถถูกเรียบง่ายในการปรับระดับสองมิติ) โมเดลความผิดพลาดคือดังนี้:
a = K(a + b) (i=X,Y,Z)
โดย a คือความเร่งของแกนที่ i ที่ออกมาจาก IMU, K คือตัวประกอบขนาดของแกนที่ i, a คือความเร่งของการพิจารณาของแกนที่ i (โปรเจกชั่นของความเร่งของแรงโน้มถ่วง),และ b คือความเสี่ยง 0 ของแกน i. โดยใช้ความเร่งเทียบ a (คํานวณจาก θ และ φ เช่น ความเร่งเทียบแกน Z a=g·cosθ·cosφ, ความเร่งเทียบแกน X a=g·sinθความเร่งเทียบแกน Y a=g·sinφ·cosθ, ที่ g คือความเร่งของแรงโน้มถ่วง, ถือว่า 9.80665m/s2) และ a, K และ b ที่ตรงกัน ได้ถูกแก้โดยใช้วิธีสี่เหลี่ยมน้อยที่สุด
(II)การปรับระดับการสับสนที่ศูนย์ของจิโรสโกป
ความเสื่อมแบบสแตติกของจิโรสโกปหมายถึง ความเบี่ยงเบนการออกของจิโรสโกปเมื่อไม่มีการใส่อัตรามุมมันจําเป็นต้องแก้ไขโดยการเก็บข้อมูลระยะยาว ในขณะที่ IMU อยู่ที่.
(III)การปรับระดับอัตราการเคลื่อนไหวของจิโรสโกป
วัตถุประสงค์ของการปรับระดับอัตราการเคลื่อนไหวของจิโรสโกป คือการแก้ไขปัจจัยการปรับขนาดของมัน โดยใช้ผลิตอัตรามุมที่รู้จักโดยแกนสองอัตราตารางเป็นข้อมูลข้อมูลเบอร์แรนซ์ โมเดลความผิดพลาดถูกกําหนด และตัวประกอบการปรับขนาดถูกแก้ด้วยการวัดสัญญาณออกของจิโรสโกป
1.การเลือกอารมณ์การปรับ: เลือกตําแหน่งแนวราบกับ 0 องศา pitch และ 0 องศา roll. ในตําแหน่งนี้ IMU ไม่มีการเข้าอัตรามุม, และการออก gyroscope มีเพียงศูนย์ bias และเสียงดัง.อัตราโต๊ะไม่จําเป็นต้องหมุนในท่านี้ เพียงแค่รักษาเวทีราบและคง
2.การเก็บข้อมูลระยะยาว: เปิดโปรแกรมการเก็บข้อมูลและเก็บสัญญาณออกของแกน X, Y และ Z ของจิโรสโกป เวลาการเก็บตัวอย่างควร ≥60 นาที และอัตราการเก็บตัวอย่าง ≥100Hzระหว่างกระบวนการซื้อขายติดตามอุณหภูมิแวดล้อมอย่างต่อเนื่อง และอัตราความตั้งของตารางเพื่อให้มั่นคงในอุณหภูมิ (อัตราการเปลี่ยนแปลง ≤0.2 °C) และไม่ให้มีการลดความตั้ง (ความเบี่ยงเบน ≤5 ′′) เพื่อหลีกเลี่ยงการนําเข้าความผิดพลาดเพิ่มเติมจากปัจจัยภายนอก
3.การคํานวณความคัดแย้ง 0: ข้อมูลการออกของจิโรสโกปที่ได้รับจะถูกพิจารณาล่วงหน้าเพื่อกําจัดค่าที่แตกต่าง (ใช้เกณฑ์ 3σ) แล้วคํานวณค่าเฉลี่ยของสัญญาณการออกของแต่ละแกนค่าเฉลี่ยนี้คือสแตติกศูนย์ bias b ของ gyroscope (i = X,Y,Z) ในขณะเดียวกัน, การเบี่ยงเบนมาตรฐานของข้อมูลถูกคํานวณเพื่อประเมินระดับเสียงของ gyroscope.หากเบี่ยงเบนมาตรฐานใหญ่เกินไป (เกินมาตรฐานทางเทคนิค IMU), ความล้มเหลวของอุปกรณ์หรือการแทรกแซงสิ่งแวดล้อม
4.การวางแผนจุดอัตรา: จากระยะของ IMU และฉากการใช้งานจริง วางแผนจุดอัตราการเคลื่อนไหวแบบไดนามิคในทั้งขนาด pitch และ roll เลือกจุดอัตราการเคลื่อนไหว 5-7 สําหรับแต่ละมิติคุ้มครองอัตราดอกเบี้ยอนาคตและอัตราดอกเบี้ยกลับ (e.g., -100°/s, -50°/s, 0°/s, 50°/s, 100°/s) โดยใช้จุดอัตรา 0°/s เพื่อตรวจสอบความสอดคล้องของความเสื่อมของสแตติกศูนย์การเลือกจุดอัตราต้องให้แน่ใจว่า มันจะไม่เกินระยะของ IMU และอัตราตารางสามารถออกอัตราอย่างมั่นคง (ความมั่นคงของอัตรา ≤ 0.1°/s)
5.อัตราการผลิตและความมั่นคง: คําสั่งสําหรับจุดอัตราการแต่ละถูกส่งตามลําดับในขนาด pitch และ roll ผ่านสองแกนอัตราโปรแกรมควบคุมโต๊ะอัตราตารางขับเคลื่อน IMU ให้หมุนไปยังอัตราเป้าหมาย, มันรักษาความมั่นคงแบบไดนามิกกับเวลาการสถาปนาการ ≥ 20s.อัตราหากความเบี่ยงเบนความเร็วเกินช่วงที่อนุญาต (≤ 0.5°/s)อัตราตารางทํางานอัตราการชดเชยโดยอัตโนมัติ
6.การเก็บข้อมูลและบันทึก: หลังจากที่จุดอัตราเฉลี่ยแต่ละจุดได้ตั้งค่าลง เริ่มใช้โปรแกรมการเก็บข้อมูลเพื่อรับสัญญาณออกของแกนที่มีความรู้สึกที่ตรงกันของจิโรสโกป (เช่นรับการออกของ gyroscope แกน X เมื่อหมุนในมิติ pitch, และได้รับการออกของ gyroscope แกน Y เมื่อหมุนในมิติม้วน) เวลาการเก็บตัวอย่าง ≥ 10s, และอัตราการเก็บตัวอย่าง ≥ 100Hz. ในเวลาเดียวกันบันทึกความเร็วมุมจริงของอัตราตาราง (ค่าเข้าค่าอ้างอิง ω) และเก็บข้อมูลตามจุดอัตราและขนาด
7.การกําหนดรูปแบบความผิดพลาดและการแก้ไขพารามิเตอร์: โมเดลความผิดพลาดอัตราสําหรับจิโรสโกปถูกกําหนด โดยไม่สนใจความผิดพลาดการเชื่อมต่อข้าม
ω = K(ω + b) (i=X,Y)
โดย ω คืออัตรามุมผลิตของแกน i ของ gyroscope, K คือตัวประกอบขนาดของแกน i, ω คืออัตรามุมมาตรฐานของแกน i (อัตราการผลิตจริงของอัตราตาราง) และ b คือความคัดค้านศูนย์สแตติกของแกนที่ i (ได้แก้ไขแล้วในการปรับสแตติก)และหาค่า K โดยใช้วิธีการขั้นกําลังสองน้อยที่สุด.
Ⅲ.การประมวลผลและการรับรองข้อมูล
การประมวลผลข้อมูลและการตรวจสอบเป็นขั้นตอนสําคัญในการรับประกันความน่าเชื่อถือของผลการปรับขนาด,การตรวจสอบความซ้ําและการตรวจสอบความแม่นยําจะต้องดําเนินการ หากการตรวจสอบล้มเหลว, กระบวนการจะต้องกลับไปสู่วิธีการปรับระดับพื้นฐานเพื่อปรับระดับใหม่
1.การกําจัดตัวที่ผิดปกติ: มาตรฐาน 3σ หรือมาตรฐาน Grubbs ใช้ในการตรวจหาและลบค่าที่แตกต่างจากข้อมูลเดิม (การเร่ง,สัญญาณอัตรามุม) สําหรับมาตรฐาน 3σการคํานวณค่าเฉลี่ย μ และค่าเบี่ยงเบนมาตรฐาน σ ของข้อมูลข้อมูลที่เกินช่วง [μ-3σ, μ+3σ] จะถูกระบุว่าเป็นค่าเฉพาะ และถูกแทนที่ด้วยการแทรกข้อมูลที่อยู่ใกล้เคียงกัน หรือถูกลบโดยตรง
2.การกรอง: ข้อมูลดิบที่ได้รับการประมวลผลก่อนถูกกรองผ่านต่ําเพื่อกําจัดเสียงกระจายความถี่สูงและความถี่ตัดถูกกําหนดขึ้นจากความกว้างแดน IMU (ปกติ 1/5 ถึง 1/3 ของความกว้างแดน IMU) เพื่อหลีกเลี่ยงการกรองเกินและการบิดเบือนสัญญาณข้อมูลที่กรองจะใช้สําหรับการคํานวณปารามิเตอร์ความผิดพลาดต่อมา
3.การสอดคล้องข้อมูล: เพื่อแก้ไขความแตกต่างของเวลาระหว่างสัญญาณออก IMU และอัตราราคาของตารางการตอบสนองสัญญาณ, การแทรกแซงเชิงเส้นถูกใช้สําหรับการปรับตรงการเรียงลําดับอัตราสถานะการตั้งตําแหน่งตารางหรืออัตราการใช้งาน โดยมีความผิดพลาดการร่วมกัน ≤1ms
4.ปริมาตรsการออกเสียงoการปรับปรุง:การแทนข้อมูลที่ผ่านการประมวลผลก่อนในรูปแบบความผิดพลาดของเครื่องวัดความเร่งและเครื่อง gyroscope และใช้วิธีสี่เหลี่ยมน้อยที่สุดในการแก้ปารามิเตอร์ความผิดพลาด เช่น ความเสื่อมศูนย์และปัจจัยการปรับขนาดสําหรับกรณีที่ซับซ้อน, วิธีการกรอง Kalman สามารถใช้ในการปรับปรุงผลการแก้ไขปารามิเตอร์, ปรับปรุงความแม่นยําและความมั่นคงของการประเมินปารามิเตอร์.
5.การวิเคราะห์ส่วนเหลือ: คํานวณค่าเหลือระหว่างค่าที่สังเกตเห็น (ผลิต IMU) และการคาดการณ์แบบจําลองในแต่ละจุดความตั้ง / อัตราการปรับขนาด.หากค่าเฉลี่ยของปริมาณที่เหลือใกล้ 0 และความเบี่ยงเบนมาตรฐานเล็ก (ความเบี่ยงเบนมาตรฐานที่เหลือในการเร่ง ≤ 0.002g, ความสับสนที่เหลือของอัตรามุม ≤ 0.1°/s), มันแสดงให้เห็นว่ารุ่นเข้ากันดี หากอัตราส่วนเหลือใหญ่เกินไปหรือแสดงแนวโน้มที่ชัดเจน, รูปแบบความผิดพลาด (เช่นการพิจารณาความผิดพลาดการเชื่อมต่อข้าม) หรือความถูกต้องของข้อมูลการปรับขนาดต้องพิจารณาใหม่.
6.การตรวจสอบความซ้ํา: ภายใต้สภาพแวดล้อมและขั้นตอนการปรับระดับเดียวกัน ทําการทดลองปรับระดับครบวงจรสามครั้ง และกําหนดปริม